Markov Property
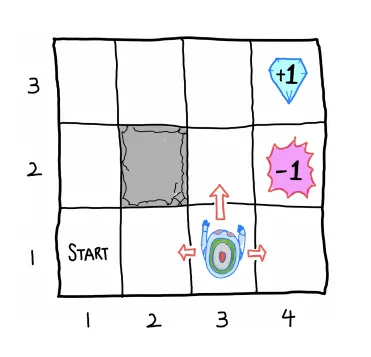
1. Grid world example
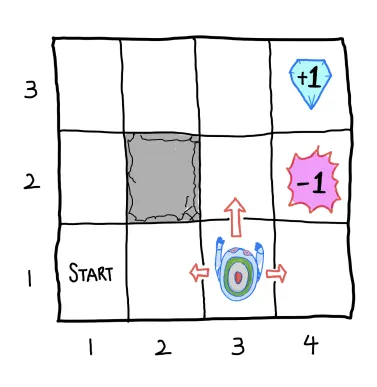

State :
Action:
Reward : 도달 시 , 도달 시 , Negative reward c (무의미한 이동 패널티)
Agent : Noisy movement
State trainsition probability
1.
에 도달 시 현재 상태 유지
2.
선택한 방향 , 좌/우 방향에 대해 확률로 이동
Terminal state :
Goal : Total sum of rewards를 maximize하는 policy 찾기
Episode

Total Reward : 5c+1
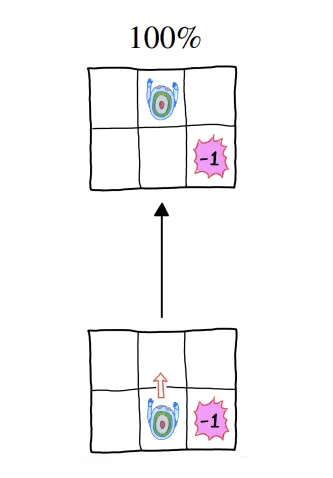
2. Actions in grid world
•
Deterministic
◦
Agent의 다음 state가 현재 state와 action에 의해서 완벽히 정해지는 경우
▪
Policy가 정해지면 episode 1개만 가능
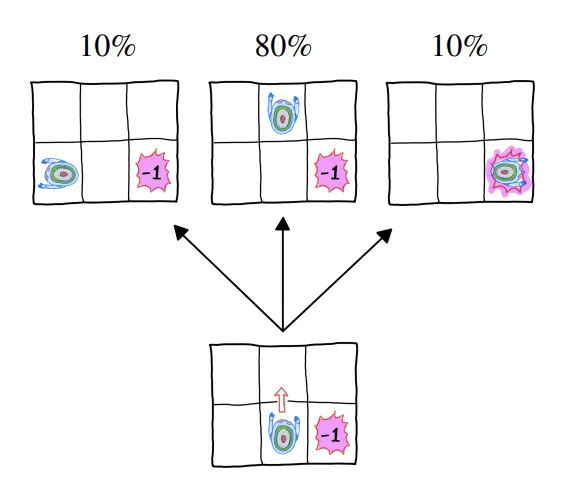
•
Stochastic
◦
Agent가 같은 state에서 같은 action을 하더라도 무작위성에 의해 다양한 결과가 가능
▪
Policy가 정해지더라도 여러 episode가 가능
3. Markov property
•
Stochastic Process
◦
시간에 따라 index가 부여된 확률 변수의 집합
◦
이산 확률 과정, 연속 확률 과정으로 구분

•
Markov Process
◦
확률 과정이 Markov property를 만족하면 Markov process라고 함
◦
Markov property 만족?
▪
현재 state 가 주어졌을 때 다음 state 이 될 확률이 과거의 상태들에 독립적이라는 것을 의미함.
•
State transition probability
◦
현재 state 에서 다음 state 이 될 확률 (상태 전이 확률)
•
State transition probability matrix
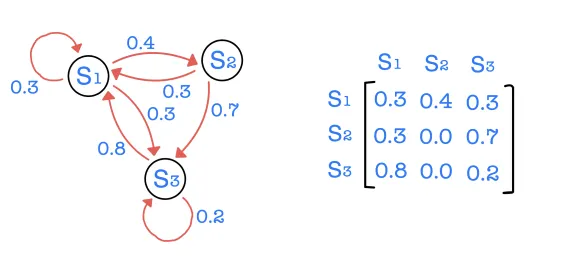
•
•
각각의 행의 합은 현재 상태에서 가능한 모든 미래 상태로의 진행 확률들의 합이므로 합은 1
결과적으로 Markov process는 (S, P)의 tuple 형태로 나타낼 수 있다. 이때 S는 state의 집합이고 P는 상태 전이 확률 행렬이 된다.
Markov Decision Process
1. MDP
•
MP
◦
(State, Transition Probability)
•
MDP
◦
(action, reward, discount factor)
◦
모든 state는 Markov property를 만족
•
Transition Probability
◦
•
Reward function
◦
Action 선택의 기준
◦
: 현재 state에서 action을 해서 다음 state로 전이될 때 얻게 되는 reward
◦
: 현재 state에 존재하기만 하면 받게 되는 reward
◦
: 현재 state에서 action을 취했을 때 얻게 되는 reward
•
: 0~1 사이의 값으로 discount factor를 의미한다.
2. Environment model
•
MDP에서의 환경 모델
◦
전이 확률
◦
전이 확률을 아는 경우 ⇒ MDP를 안다 ⇒ Model-based ⇒ Dynamic programming ⇒ optimal policy
◦
전이 확률을 모르는 경우 ⇒ MDP를 모른다 ⇒ Model-free ⇒ Reinforce learning ⇒ optimal policy
3. Optimal policy in Grid world example
State :
Action:
Reward : 도달 시 , 도달 시 , Negative reward c (무의미한 이동 패널티)
Agent : Noisy movement
State trainsition probability
1.
에 도달 시 현재 상태 유지
2.
선택한 방향 , 좌/우 방향에 대해 확률로 이동
Terminal state :
Goal : Total sum of rewards를 maximize하는 policy 찾기
•
Optimal policy()
◦
각 state에서 어떤 action을 선택할 것인지에 대한 정보
◦
위의 예시에서 9개 각각의 state마다 취하는 action을 결정하는 함수 = policy
▪
이때 state transition probability에 의해서 같은 action을 선택하더라도 전이되는 state가 다를 수 있음
▪
그러므로 하나의 policy에 의해 여러 개의 episode가 생성될 수 있음.
▪
따라서 reward의 단순 합이 아닌 합의 기댓값을 최대화 하는 policy optimal policy 로 나타냄
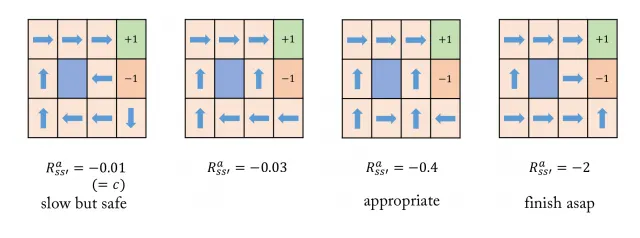
⇒ 위 그림은 각 모델마다 서로 다른 Optimal policy
•
Negative reward의 차이로 서로 다른 모델 = optimal policy 다름
•
Small negative reward 의 값이 크면 각각의 이동에 대해 주어지는 Penalty가 작음
◦
1번 case의 (3,2)에서 Optimal action이 west가 된다.
▪
-1에 도달할 가능성을 완전히 배제하기 위한 것
▪
west action을 취하고 transition probability에 의해 north로 전이되기를 희망하는 것
▪
같은 이유로 (4,1)에서의 Optimal action도 south가 된다.
◦
2번 case에서는 c의 값이 1번에 비해 작아졌으므로, step의 증가에 따른 penalty가 늘어남
▪
따라서 (3,2)와 (4,1)에서 optimal action이 달라짐.
◦
마지막으로 4번 case의 경우 각 step에 대한 penalty가 -2로 굉장히 큼
▪
따라서 최대한 빠른 종료를 하도록 Optimal policy가 주어짐
▪
특히 (3,2)에서 east action을 optimal로 취급함
▪
만약 north action을 optimal로 취급하는 경우 가장 큰 reward는 -1인데, 이 경우는 -1을 얻기 위한 확률이 0.8*0.8=0.64가 되므로 (3,2)에서의 optimal action은 east임
Reward, Policy
1. Reward
•
Scalar feedback
•
t step에서 agent의 action이 얼마나 적절한지를 나타냄
⇒ agent의 목표는 reward의 누적 합을 최대화 하는 것
•
Reward Hypothesis
◦
강화학습의 모든 목표는 reward의 누적 합의 기댓값을 최대화 하는 것으로 표현 가능
◦
기댓값이 사용되는 이유는 하나의 policy를 따른다고 하더라도, transition probability에 의해서 나올 수 있는 episode가 다양하기 때문임.
2. Known dynamics
•
모든 transition에 대해서 dynamics( )를 안다고 가정하면 transition probability, reward 등을 이를 사용해 계산 가능
•
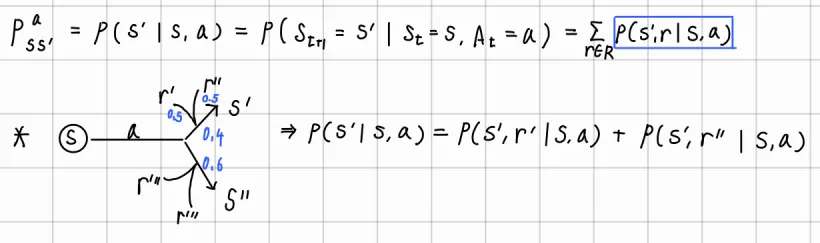
transition probability
◦
현재 state 에서 action 를 선택하여 다음 state 으로 전이하는 과정에서 얻을 수 있는 reward를 도입하여 transition probability를 표현할 수 있음(Marginalization)
•
Expected reward (state-action pair)
◦
기댓값 부분을 기댓값의 정의에 의해 표현.
◦
가 현재 state 에서 action 를 선택했을 때 얻을 수 있는 reward에 대한 확률
▪
따라서 marginalization을 통해 state 에서 action 를 선택했을 때 reward 을 받고 전이 가능한 모든 에 대한 합으로 표현 가능

•
Expected reward (state-action-next_state)
◦
기댓값 부분을 기댓값 정의에 의해 표현.
◦
을 조건부 확률의 정의에 의해 표현
◦
조건을 동시에 추가

⇒ 각 식의 전개 과정에 dynamics 항이 존재하므로, 이를 안다면 transition probability, reward는 dynamics를 통해 계산 가능하다.
3. Return

•
t 시점부터 종료 시점까지 감가된 reward의 누적 합이다.
•
감가율 는 0~1 사이의 실수 값으로, 미래의 reward의 불확실성에 대한 표현
◦
크기에 따라 근시안적이거나 원시안적인 모델임을 표현 가능
◦
Discount factor를 사용하는 이유
▪
return의 무한대 발산을 막음
▪
미래의 불확실성에 대한 표현이 가능
▪
모든 sequence가 반드시 종료되는 경우 사용하지 않는 경우도 있음
4. Policy
•
Stochastic policy
◦
주어진 state에서 취하는 action에 대한 확률 분포
◦
•
Deterministic policy
◦
Policy는 각 state에서 어떤 action을 취하는 것이 optimal한지, 즉 total discounted reward를 최대화하기 위한 action 선택에 대한 guideline이다. 이때 MDP에서의 policy는 MDP 각 state가 Markov property를 만족하기 때문에 오직 현재 state에 대해서만 종속적이다.
•
Case1) Known MDP
◦
Deterministic optimal policy 가 존재한다.
•
Case2) Unknown MDP
◦
Stochastic policy를 고려해야 하며, 방식을 사용한다.
방식은 만큼 random한 action을 선택하고 만큼 greedy한 action(optimal)을 선택하여 현재 sample에서 비록 최적은 아닐지라도, 경험하지 않은 action에 대해서도 고려할 수 있도록 해준다. 이때 의 확률은 선택 가능한 모든 action에 대해서 동등하게 나누게 된다.
5. Notation
: State-value function → 현재 state에서 policy 를 따랐을 때 가능한 모든 return에 대한 기댓값
: Optimal state-value function → 현재 state에서 optimal policy 를 따랐을 때의 value
: Action value function → 현재 state에서 action 를 선택하고 이후에 를 따를 때의 value
: Optimal action-value function → 현재 state에서 action 를 선택하고 이후에 에 따를 때의 value
**이때 value는 각각 return의 기댓값을 의미한다.